|
伺服电机构造及工作原理 |
|
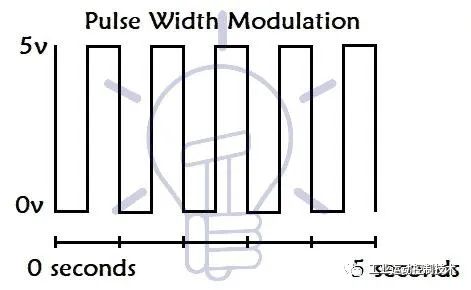
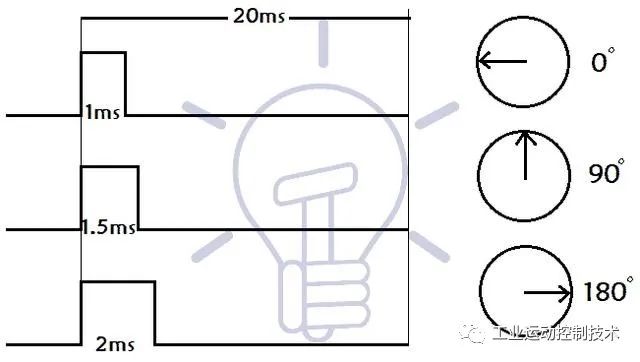
是直流电机,具有以下5个部分:1.定子绕组:这种类型的绕组绕在电机的固定部分。它也被称为电机的励磁绕组。2.转子绕组:这种类型的绕组绕在电机的旋转部分。它也被称为电机的电枢绕组。3.轴承:有两种类型,即字体轴承和背面 轴承 ,用于轴的运动。4.轴:电枢绕组 它由三种基本类型组成:1.控制装置2.输出传感器3.反馈系统伺服电机工作在自动闭环系统的现象上。该闭环系统要控制器。该控制器由比较器和反馈路径组成。它有一个输出和两个输入。在这种情况下,为了产生输出信号,比较器用于比较所需的参考信号,并且该输出信号由传感器感测。电机的输入信号称为反馈信号。根据反馈信号,电机开始工作。比较器信号称为电机的逻辑信号。当逻辑差值较高时,电机将在所需要的时间内打开,当逻辑差值较低时,电机将在所需要的时间内关闭。基本上,比较器用于确定电机是ON还是OFF。电机的正常运行可以在良好的控制器的帮助下完成。 伺服电机控制:伺服电机能够最终靠PWM方法控制,即脉宽调制。它们向电机发送宽度不一致的电信号。宽度脉冲在1毫秒至2毫秒的范围内变化,并在一秒钟内重复50次将其传输到伺服电机。脉冲的宽度控制旋转轴的角位置。其中,使用了三个术语来表示伺服电机的控制,即最大脉冲,最小脉冲和重复率。例如 ,舵机以1毫秒的脉冲移动,使电机向0°转动,而以2毫秒的脉冲将电机向180°转动,在角位置之间,脉冲宽度自行互换。因此,伺服以宽度为90.1毫秒的脉冲转向5°。
每个伺服电机中都有三根电线或引线。两根线使用正电源和接地电源,而第三根线用于控制信号。
伺服具有位置传感器,直流电动机,齿轮系统,控制电路。从电池获取电力时,直流电机以高速和低扭矩运行。该速度较低,扭矩将高于连接到直流电机的齿轮和轴组件。轴的位置由位置传感器从其确定位置做感应,并向控制电路提供信息。信号由位置传感器的控制电路解码,并处理旋转方向以获得正确的位置。它需要4.8 V至6 V的直流电源。减速齿轮箱连接到一个轴上,该轴会降低电机的转速。减速齿轮箱的输出轴与与编码器或电位器连接的电机相同。 然后将编码器的输出连接到控制电路。伺服电机的电线也连接到控制电路。电机通过微控制器通过PWM的形式发送信号来控制,PWM解码控制电路以所需角度旋转电机,控制电路沿顺时针或逆时针方向挪动电机,这样轴也沿所需方向旋转。编码器将反馈信号发送到控制电路。当电机达到所需角度时,控制电路会根据从编码器接收的信号相应地停止电机。例如,如果电机处于30°,并且微控制器为电机提供60°的角度,则控制电路沿顺时针方向旋转电机。当电机达到60°时,编码器向控制电路发送信号以停止电机。 声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉
是一种能够将电能转化为机械能的装置,它可以精确地控制速度和位置,具有反应快速等特点,通常被应用在自动控制系统中执行元件,是 具有独特的特性,即依据输入信号的脉冲宽度转向特定角度(0,90,180)。这些 系统(servo mechanism)是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。 是通过编写程序、检测输入信号、信号处理、控制输出、反馈监测等步骤来实现。 转子转速受输入信号控制,并能快速反应,在自动控制系统中,用 作执行元件 ,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流 驱动,其终端(输出端)带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较 的应用领域很多,如数字控制机床、印刷设备、包装设备、纺织设备、激光加工设施、机器人、自动化生产线等对工艺精度、加工效率和 控制器通常使用闭环控制方式,即将编码器或位置传感器的反馈信号与期望的控制信号作比较,从而调整输出信号以控制 基本上与电容分相式单相异步电动机相似其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流 的作用是驱动控制对象。被控对象的转距和转速受信号电压控制,信号电压的大小和极性改变时, 系统(servo mechanism)是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。 轴上齿轮啮合输出轴上的大齿轮来达到减速的目的。 减速机是一种动力传达 ,利用齿轮的速度转换器,将马达的回转数减速到所要的回转数,并得到较大转矩的 系统中控制机械元件的发动机,也是一种补助马达间接变速装置,常被应用在工业自动控制系统中,大致上可以分为交流同服 可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。 硬盘是电脑重要的储存媒介,是电脑必不可少的组成部分,但很多人并不知道硬盘的 有着更高的精准度,在操作的流程中能够轻松的利用电压来控制转速的输出,从而满足多种情况下的转速需求,保证了动力的完美利用,确保了机械应用效率更高。 。驱动器的结构简图如下,和变频器的主电路类似,电源经过整流,逆变,实现从AC-DC-AC的转换。 :在控制信号发出之前,转子静止不动;当控制信号发出时,转子立即转动;当控制信号消失时,转子能即时停转。 接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给 内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时 自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值作比较,调整转子转动 放大器控制的U,V,W 三相电形成电磁场,转子在此磁场的作用下转动,同时 自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值作比较,调整转子转动的角度。 基本上与电容分相式单相异步电动机相似,其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流 可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。 可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。 基本上与电容分相式单相异步电动机相似。其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流 内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时 内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电 分析由莫塞莱定律可知,各种元素的特征X射线都具有各自确定的波长,并满足以下 下一篇:OFweek工控网 |